#include "RigidBodyMotion.h"#include "GenericGraphicsInterface.h"#include "display.h"#include "TimeFunction.h"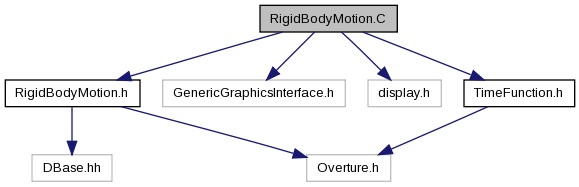
Macros | |
| #define | DGECO EXTERN_C_NAME(dgeco) |
| #define | SGECO EXTERN_C_NAME(sgeco) |
| #define | DGESL EXTERN_C_NAME(dgesl) |
| #define | SGESL EXTERN_C_NAME(sgesl) |
| #define | GECO SGECO |
| #define | GESL SGESL |
Functions | |
| RealArray | mult (const RealArray &a, const RealArray &b) |
| return the product if two matrices. | |
| RealArray | trans (const RealArray &a) |
| return the transpose of a matrix | |
| real | dot (const RealArray &a, const RealArray &b) |
| return the dot product of two arrays | |
| RealArray | getCrossProductMatrix (const RealArray &w) |
| Return the matrix which represents the cross product of w with another vector, [ w X ]. | |
| void | SGECO (real &b, const int &nbd, const int &nb, int &ipvt, real &rcond, real &work) |
| void | DGECO (real &b, const int &nbd, const int &nb, int &ipvt, real &rcond, real &work) |
| void | SGESL (real &a, const int &lda, const int &n, int &ipvt, real &b, int &job) |
| void | DGESL (real &a, const int &lda, const int &n, int &ipvt, real &b, int &job) |
| RealArray | solve (const RealArray &a, const RealArray &b) |
| solve the matrix equation A*x = b and return x. | |
| int | arrayToState (const RealArray &yv, RealArray &xv, RealArray &vv, RealArray &omegav, RealArray &ea) |
| Unpack the state vector yv into the arrays xv, vv, omegav, and matrix ea. | |
| int | stateToArray (const RealArray &xv, const RealArray &vv, const RealArray &omegav, const RealArray &ea, RealArray &yv) |
| Pack the arrays xv, vv, omegav, and matrix ea into the state vector yv. | |
Macro Definition Documentation
| #define DGECO EXTERN_C_NAME(dgeco) |
| #define DGESL EXTERN_C_NAME(dgesl) |
| #define GECO SGECO |
| #define GESL SGESL |
| #define SGECO EXTERN_C_NAME(sgeco) |
| #define SGESL EXTERN_C_NAME(sgesl) |
Function Documentation
| int arrayToState | ( | const RealArray & | yv, |
| RealArray & | xv, | ||
| RealArray & | vv, | ||
| RealArray & | omegav, | ||
| RealArray & | ea | ||
| ) |
Unpack the state vector yv into the arrays xv, vv, omegav, and matrix ea.
Referenced by RigidBodyMotion::dirkImplicitSolve().
| void DGECO | ( | real & | b, |
| const int & | nbd, | ||
| const int & | nb, | ||
| int & | ipvt, | ||
| real & | rcond, | ||
| real & | work | ||
| ) |
| void DGESL | ( | real & | a, |
| const int & | lda, | ||
| const int & | n, | ||
| int & | ipvt, | ||
| real & | b, | ||
| int & | job | ||
| ) |
| real dot | ( | const RealArray & | a, |
| const RealArray & | b | ||
| ) |
return the dot product of two arrays
References a, i, m, OV_ABORT(), and printF().
Referenced by Maxwell::advanceNew(), RigidBodyMotion::applyConstraints(), RigidBodyMotion::dirkImplicitSolve(), RigidBodyMotion::takeStepImplicitRungeKutta(), RigidBodyMotion::takeStepLeapFrog(), RigidBodyMotion::takeStepTrapezoid(), and RigidBodyMotion::update().
| RealArray getCrossProductMatrix | ( | const RealArray & | w | ) |
Return the matrix which represents the cross product of w with another vector, [ w X ].
References assert(), n, and W.
Referenced by RigidBodyMotion::dirkImplicitSolve(), RigidBodyMotion::getCoordinates(), RigidBodyMotion::getForceInternal(), RigidBodyMotion::takeStepLeapFrog(), and RigidBodyMotion::takeStepTrapezoid().
| RealArray mult | ( | const RealArray & | a, |
| const RealArray & | b | ||
| ) |
return the product if two matrices.
References a, assert(), c, display(), i, j, k, m, n, OV_ABORT(), and printF().
Referenced by RigidBodyMotion::dirkImplicitSolve(), RigidBodyMotion::getCoordinates(), RigidBodyMotion::getForce(), RigidBodyMotion::getForceInternal(), RigidBodyMotion::integrate(), main(), RigidBodyMotion::takeStepLeapFrog(), and RigidBodyMotion::takeStepTrapezoid().
| void SGECO | ( | real & | b, |
| const int & | nbd, | ||
| const int & | nb, | ||
| int & | ipvt, | ||
| real & | rcond, | ||
| real & | work | ||
| ) |
| void SGESL | ( | real & | a, |
| const int & | lda, | ||
| const int & | n, | ||
| int & | ipvt, | ||
| real & | b, | ||
| int & | job | ||
| ) |
| RealArray solve | ( | const RealArray & | a, |
| const RealArray & | b | ||
| ) |
solve the matrix equation A*x = b and return x.
References a, display(), GECO, GESL, m, OV_ABORT(), printF(), and x.
Referenced by RigidBodyMotion::dirkImplicitSolve().
| int stateToArray | ( | const RealArray & | xv, |
| const RealArray & | vv, | ||
| const RealArray & | omegav, | ||
| const RealArray & | ea, | ||
| RealArray & | yv | ||
| ) |
| RealArray trans | ( | const RealArray & | a | ) |
return the transpose of a matrix
References a, c, i, j, m, and n.
Referenced by RigidBodyMotion::dirkImplicitSolve(), RigidBodyMotion::getCoordinates(), RigidBodyMotion::takeStepLeapFrog(), and RigidBodyMotion::takeStepTrapezoid().
