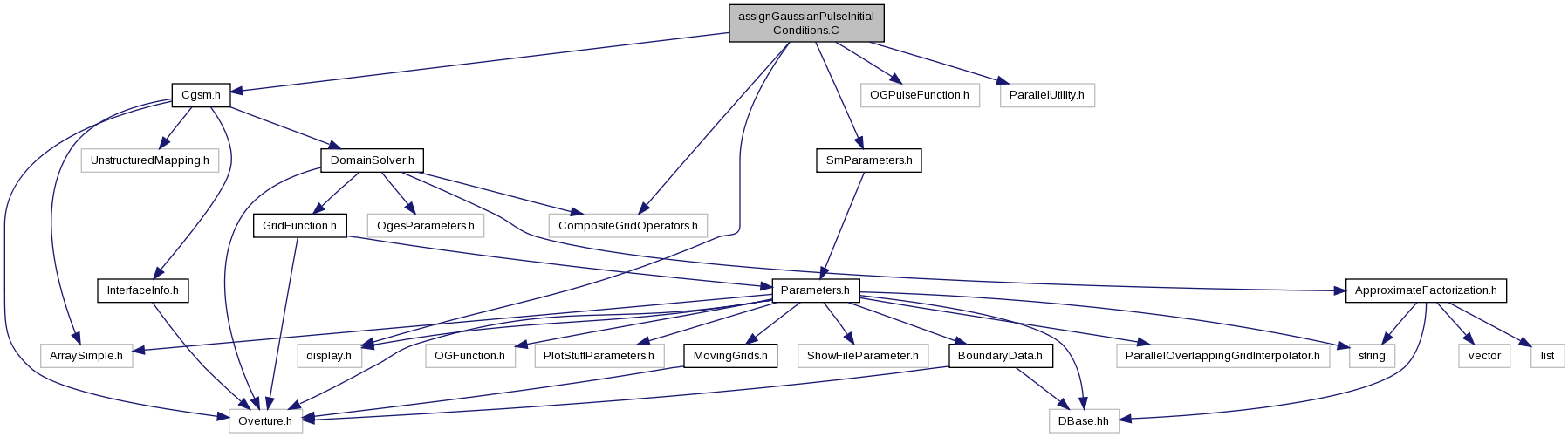
#include "Cgsm.h"#include "SmParameters.h"#include "CompositeGridOperators.h"#include "display.h"#include "OGPulseFunction.h"#include "ParallelUtility.h"
Include dependency graph for assignGaussianPulseInitialConditions.C:
Macros | |
| #define | FOR_3D(i1, i2, i3, I1, I2, I3) int I1Base =I1.getBase(), I2Base =I2.getBase(), I3Base =I3.getBase(); int I1Bound=I1.getBound(), I2Bound=I2.getBound(), I3Bound=I3.getBound(); for(i3=I3Base; i3<=I3Bound; i3++) for(i2=I2Base; i2<=I2Bound; i2++) for(i1=I1Base; i1<=I1Bound; i1++) |
| #define | FOR_3(i1, i2, i3, I1, I2, I3) I1Base =I1.getBase(), I2Base =I2.getBase(), I3Base =I3.getBase(); I1Bound=I1.getBound(), I2Bound=I2.getBound(), I3Bound=I3.getBound(); for(i3=I3Base; i3<=I3Bound; i3++) for(i2=I2Base; i2<=I2Bound; i2++) for(i1=I1Base; i1<=I1Bound; i1++) |
| #define | U(i0, i1, i2, i3) up[i0+uDim0*(i1+uDim1*(i2+uDim2*(i3)))] |
| #define | X(i0, i1, i2, i3) xp[i0+xDim0*(i1+xDim1*(i2+xDim2*(i3)))] |
| #define | U0(x, y, t) ( exp( - alpha*( SQR((x)-(xPulse-c*t)) + SQR((y)-yPulse) ) ) ) |
| #define | U0T(x, y, t) ( (-2.*c*alpha)*( (x)-(xPulse-c*t) )*U0(x,y,t) ) |
| #define | U0X(x, y, t) ( ( -2.*alpha)*( (x)-(xPulse-c*t) )*U0(x,y,t) ) |
| #define | U0Y(x, y, t) ( ( -2.*alpha)*( (y)-(yPulse ) )*U0(x,y,t) ) |
| #define | U3D(x, y, z, t) exp( - alpha*( SQR((x)-(xPulse-c*t)) + SQR((y)-yPulse) + SQR((z)-zPulse) ) ) |
| #define | U3DT(x, y, z, t) ( (-2.*c*alpha)*( (x)-(xPulse-c*t) )*U3D(x,y,z,t) ) |
| #define | U3DX(x, y, z, t) ( ( -2.*alpha)*( (x)-(xPulse-c*t) )*U3D(x,y,z,t) ) |
| #define | U3DY(x, y, z, t) ( ( -2.*alpha)*( (y)-(yPulse ) )*U3D(x,y,z,t) ) |
| #define | U3DZ(x, y, z, t) ( ( -2.*alpha)*( (z)-(zPulse ) )*U3D(x,y,z,t) ) |
| #define | VERTEX0(i0, i1, i2) xa+dx0*(i0-i0a) |
| #define | VERTEX1(i0, i1, i2) ya+dy0*(i1-i1a) |
| #define | VERTEX2(i0, i1, i2) za+dz0*(i2-i2a) |
Macro Definition Documentation
| #define FOR_3 | ( | i1, | |
| i2, | |||
| i3, | |||
| I1, | |||
| I2, | |||
| I3 | |||
| ) | I1Base =I1.getBase(), I2Base =I2.getBase(), I3Base =I3.getBase(); I1Bound=I1.getBound(), I2Bound=I2.getBound(), I3Bound=I3.getBound(); for(i3=I3Base; i3<=I3Bound; i3++) for(i2=I2Base; i2<=I2Bound; i2++) for(i1=I1Base; i1<=I1Bound; i1++) |
| #define FOR_3D | ( | i1, | |
| i2, | |||
| i3, | |||
| I1, | |||
| I2, | |||
| I3 | |||
| ) | int I1Base =I1.getBase(), I2Base =I2.getBase(), I3Base =I3.getBase(); int I1Bound=I1.getBound(), I2Bound=I2.getBound(), I3Bound=I3.getBound(); for(i3=I3Base; i3<=I3Bound; i3++) for(i2=I2Base; i2<=I2Bound; i2++) for(i1=I1Base; i1<=I1Bound; i1++) |
| #define U3D | ( | x, | |
| y, | |||
| z, | |||
| t | |||
| ) | exp( - alpha*( SQR((x)-(xPulse-c*t)) + SQR((y)-yPulse) + SQR((z)-zPulse) ) ) |
Referenced by Cgsm::assignGaussianPulseInitialConditions(), and Cgsm::userDefinedInitialConditions().
Referenced by Cgsm::assignGaussianPulseInitialConditions(), and Cgsm::userDefinedInitialConditions().
Referenced by Cgsm::assignGaussianPulseInitialConditions(), and Cgsm::userDefinedInitialConditions().
Referenced by Cgsm::assignGaussianPulseInitialConditions(), and Cgsm::userDefinedInitialConditions().
