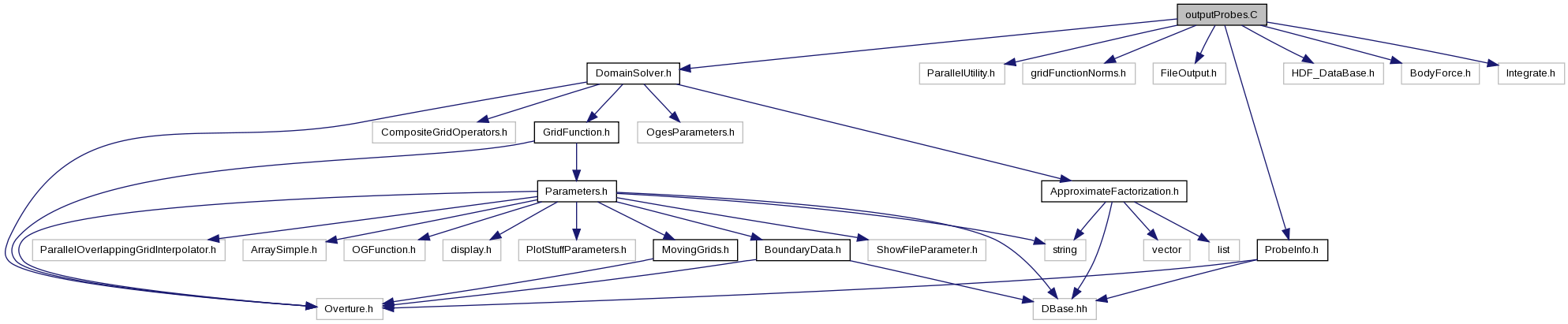
#include "DomainSolver.h"#include "ParallelUtility.h"#include "gridFunctionNorms.h"#include "FileOutput.h"#include "ProbeInfo.h"#include "HDF_DataBase.h"#include "BodyForce.h"#include "Integrate.h"
Include dependency graph for outputProbes.C:
Macros | |
| #define | FOR_3D(i1, i2, i3, I1, I2, I3) int I1Base =I1.getBase(), I2Base =I2.getBase(), I3Base =I3.getBase(); int I1Bound=I1.getBound(), I2Bound=I2.getBound(), I3Bound=I3.getBound(); for(i3=I3Base; i3<=I3Bound; i3++) for(i2=I2Base; i2<=I2Bound; i2++) for(i1=I1Base; i1<=I1Bound; i1++) |
| #define | U uLocal |
| #define | RX(I1, I2, I3) rx(I1,I2,I3,0) |
| #define | SX(I1, I2, I3) rx(I1,I2,I3,1) |
| #define | TX(I1, I2, I3) rx(I1,I2,I3,2) |
| #define | RY(I1, I2, I3) rx(I1,I2,I3,0+numberOfDimensions) |
| #define | SY(I1, I2, I3) rx(I1,I2,I3,1+numberOfDimensions) |
| #define | TY(I1, I2, I3) rx(I1,I2,I3,5) |
| #define | RZ(I1, I2, I3) rx(I1,I2,I3,6) |
| #define | SZ(I1, I2, I3) rx(I1,I2,I3,7) |
| #define | TZ(I1, I2, I3) rx(I1,I2,I3,8) |
| #define | d12(axis) 1./(2.*dr[axis]) |
| #define | d22(axis) 1./(dr[axis]*dr[axis]) |
| #define | UR2(I1, I2, I3, KD) ( (U(I1+1,I2,I3,KD)-U(I1-1,I2,I3,KD))*d12(axis1) ) |
| #define | US2(I1, I2, I3, KD) ( (U(I1,I2+1,I3,KD)-U(I1,I2-1,I3,KD))*d12(axis2) ) |
| #define | UT2(I1, I2, I3, KD) ( (U(I1,I2,I3+1,KD)-U(I1,I2,I3-1,KD))*d12(axis3) ) |
| #define | UX22(I1, I2, I3, KD) ( RX(I1,I2,I3)*UR2(I1,I2,I3,KD) +SX(I1,I2,I3)*US2(I1,I2,I3,KD) ) |
| #define | UY22(I1, I2, I3, KD) ( RY(I1,I2,I3)*UR2(I1,I2,I3,KD) +SY(I1,I2,I3)*US2(I1,I2,I3,KD) ) |
| #define | UX23(I1, I2, I3, KD) ( RX(I1,I2,I3)*UR2(I1,I2,I3,KD) +SX(I1,I2,I3)*US2(I1,I2,I3,KD) +TX(I1,I2,I3)*UT2(I1,I2,I3,KD) ) |
| #define | UY23(I1, I2, I3, KD) ( RY(I1,I2,I3)*UR2(I1,I2,I3,KD) +SY(I1,I2,I3)*US2(I1,I2,I3,KD) +TY(I1,I2,I3)*UT2(I1,I2,I3,KD) ) |
| #define | UZ23(I1, I2, I3, KD) ( RZ(I1,I2,I3)*UR2(I1,I2,I3,KD) +SZ(I1,I2,I3)*US2(I1,I2,I3,KD) +TZ(I1,I2,I3)*UT2(I1,I2,I3,KD) ) |
| #define | h21(axis) 1./(2.*dvx[axis]) |
| #define | h22(axis) 1./(dvx[axis]*dvx[axis]) |
| #define | UX22R(I1, I2, I3, KD) ( (U(I1+1,I2,I3,KD)-U(I1-1,I2,I3,KD))*h21(axis1) ) |
| #define | UY22R(I1, I2, I3, KD) ( (U(I1,I2+1,I3,KD)-U(I1,I2-1,I3,KD))*h21(axis2) ) |
| #define | UZ23R(I1, I2, I3, KD) ( (U(I1,I2,I3+1,KD)-U(I1,I2,I3-1,KD))*h21(axis3) ) |
| #define | XC0(i1, i2, i3) (xab[0][0]+dvx[0]*(i1-iv0[0])) |
| #define | XC1(i1, i2, i3) (xab[0][1]+dvx[1]*(i2-iv0[1])) |
| #define | XC2(i1, i2, i3) (xab[0][2]+dvx[2]*(i3-iv0[2])) |
| #define | bb(side, axis) boundingBox[(side)+2*(axis)] |
| #define | xBounds(side, axis) pxBounds[(side)+2*(axis)] |
| #define | XC(iv, axis) (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define | xab(side, axis) boxBounds[(side)+2*(axis)] |
| #define | xab(side, axis) boxBounds[(side)+2*(axis)] |
Macro Definition Documentation
Referenced by GridEvolution::getAcceleration(), insbe1(), and insbe2().
Referenced by GridEvolution::getAcceleration(), insbe1(), and insbe2().
| #define FOR_3D | ( | i1, | |
| i2, | |||
| i3, | |||
| I1, | |||
| I2, | |||
| I3 | |||
| ) | int I1Base =I1.getBase(), I2Base =I2.getBase(), I3Base =I3.getBase(); int I1Bound=I1.getBound(), I2Bound=I2.getBound(), I3Bound=I3.getBound(); for(i3=I3Base; i3<=I3Bound; i3++) for(i2=I2Base; i2<=I2Bound; i2++) for(i1=I1Base; i1<=I1Bound; i1++) |
| #define U uLocal |
Referenced by DomainSolver::outputProbes().
Referenced by DomainSolver::outputProbes().
| #define UX23 | ( | I1, | |
| I2, | |||
| I3, | |||
| KD | |||
| ) | ( RX(I1,I2,I3)*UR2(I1,I2,I3,KD) +SX(I1,I2,I3)*US2(I1,I2,I3,KD) +TX(I1,I2,I3)*UT2(I1,I2,I3,KD) ) |
Referenced by DomainSolver::outputProbes().
Referenced by DomainSolver::outputProbes().
Referenced by DomainSolver::outputProbes().
| #define UY23 | ( | I1, | |
| I2, | |||
| I3, | |||
| KD | |||
| ) | ( RY(I1,I2,I3)*UR2(I1,I2,I3,KD) +SY(I1,I2,I3)*US2(I1,I2,I3,KD) +TY(I1,I2,I3)*UT2(I1,I2,I3,KD) ) |
Referenced by DomainSolver::outputProbes().
| #define UZ23 | ( | I1, | |
| I2, | |||
| I3, | |||
| KD | |||
| ) | ( RZ(I1,I2,I3)*UR2(I1,I2,I3,KD) +SZ(I1,I2,I3)*US2(I1,I2,I3,KD) +TZ(I1,I2,I3)*UT2(I1,I2,I3,KD) ) |
Referenced by DomainSolver::outputProbes().
Referenced by DomainSolver::outputProbes().
