#include <MovingGrids.h>
Public Types | |
| enum | MovingGridOption { notMoving, rotate, shift, oscillate, scale, matrixMotion, rigidBody, deformingBody, userDefinedMovingGrid, numberOfMovingGridOptions } |
Public Member Functions | |
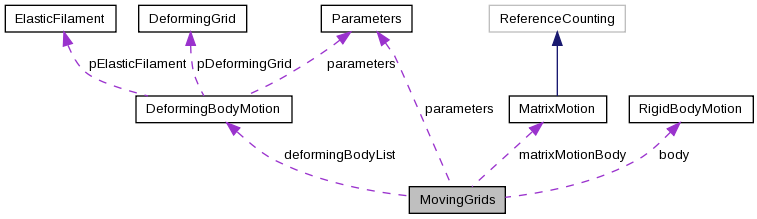
| MovingGrids (Parameters ¶meters) | |
| This class is used to move grids. | |
| MovingGrids (const MovingGrids &mg) | |
| virtual | ~MovingGrids () |
| virtual int | correctGrids (const real t1, const real t2, GridFunction &cgf1, GridFunction &cgf2) |
| Corrector step for moving grids. | |
| int | debug () const |
| int | detectCollisions (GridFunction &cgf1) |
| Detect collisions. | |
| virtual int | getBoundaryAcceleration (MappedGrid &c, realSerialArray >t, int grid, real t0, int option) |
| bool | getCorrectionHasConverged () |
| Return true if the correction steps for moving grids have converged. This is usually only an issue for "light" bodies. | |
| virtual int | getGridVelocity (GridFunction &gf0, const real &tGV) |
| Integrate * | getIntegrate () const |
| Return a pointer to the Integrate object. | |
| const RealArray & | getMoveParameters () const |
| real | getMaximumRelativeCorrection () |
| Return the maximum relative change in the moving grid correction scheme. This is usually only an issue for "light" bodies. | |
| int | getNumberOfDeformingBodies () const |
| Return the number of deforming bodies. | |
| DeformingBodyMotion & | getDeformingBody (const int bodyNumber) |
| Return the object that describes a deforming body. | |
| int | getNumberOfMatrixMotionBodies () const |
| Return the number of matrix motion bodies. | |
| MatrixMotion & | getMatrixMotionBody (const int bodyNumber) |
| int | getNumberOfRigidBodies () const |
| Return the number of rigid bodies. | |
| RigidBodyMotion & | getRigidBody (const int bodyNumber) |
| Return the object that describes a rigid body. | |
| real | getTimeStepForRigidBodies () const |
| int | getUserDefinedBoundaryAcceleration (MappedGrid &mg, realSerialArray >t, int grid, real t0, int option, const int side, const int axis) |
| int | getUserDefinedGridVelocity (GridFunction &gf0, const real &t0, const int grid) |
| int | get (const GenericDataBase &dir, const aString &name) |
| virtual int | gridAccelerationBC (const int &grid, const real &t0, MappedGrid &c, realMappedGridFunction &u, realMappedGridFunction &f, realMappedGridFunction &gridVelocity, realSerialArray &normal, const Index &I1, const Index &I2, const Index &I3, const Index &I1g, const Index &I2g, const Index &I3g) |
| Add the grid acceleration in the normal direction, n.x_tt, to the function f f is normally the function that holds the rhs for the pressure eqn. | |
| bool | gridIsMoving (int grid) const |
| virtual int | moveDeformingBodies (const real &t1, const real &t2, const real &t3, const real &dt0, GridFunction &cgf1, GridFunction &cgf2, GridFunction &cgf3) |
| virtual int | moveGrids (const real &t1, const real &t2, const real &t3, const real &dt0, GridFunction &cgf1, GridFunction &cgf2, GridFunction &cgf3) |
| Move grids to the new time. | |
| MovingGridOption | movingGridOption (int grid) const |
| aString | movingGridOptionName (MovingGridOption option) const |
| bool | isMovingGridProblem () const |
| int | put (GenericDataBase &dir, const aString &name) const |
| virtual int | rigidBodyMotion (const real &t1, const real &t2, const real &t3, const real &dt0, GridFunction &cgf1, GridFunction &cgf2, GridFunction &cgf3) |
| virtual int | saveToShowFile () const |
| Save moving grid info the the show file. We save a "sequence" for each rigid body. | |
| int | setIsMovingGridProblem (bool trueOrFalse=TRUE) |
| virtual int | update (CompositeGrid &cg, GenericGraphicsInterface &gi) |
| Define moving grid properties interactively. | |
| int | updateToMatchGrid (CompositeGrid &cg) |
| int | userDefinedMotion (const real &t1, const real &t2, const real &t3, const real &dt0, GridFunction &cgf1, GridFunction &cgf2, GridFunction &cgf3) |
| int | userDefinedTransformMotion (const real &t1, const real &t2, const real &t3, const real &dt0, GridFunction &cgf1, GridFunction &cgf2, GridFunction &cgf3, const int grid) |
| int | userDefinedGridAccelerationBC (const int &grid, const real &t0, MappedGrid &c, realMappedGridFunction &u, realMappedGridFunction &f, realMappedGridFunction &gridVelocity, realSerialArray &normal, const Index &I1, const Index &I2, const Index &I3, const Index &I1g, const Index &I2g, const Index &I3g) |
| int | updateUserDefinedMotion (CompositeGrid &cg, GenericGraphicsInterface &gi) |
Static Public Attributes | |
| static int | debug0 =0 |
Protected Member Functions | |
| int | initialize () |
| int | getRamp (real t, real rampInterval, real &ramp, real &rampSpeed, real &rampAcceleration) |
| Return ramp value and derivatives. | |
Protected Attributes | |
| Parameters & | parameters |
| IntegerArray | gridsToMove |
| bool | isInitialized |
| bool | movingGridProblem |
| IntegerArray | moveOption |
| IntegerArray | movingGrid |
| RealArray | moveParameters |
| int | numberOfMatrixMotionBodies |
| MatrixMotion ** | matrixMotionBody |
| int | numberOfRigidBodies |
| RigidBodyMotion ** | body |
| Integrate * | integrate |
| bool | useHybridGridsForSurfaceIntegrals |
| int | rigidBodyInfoCount |
| RealArray | rigidBodyInfo |
| RealArray | rigidBodyInfoTime |
| int | numberOfRigidBodyInfoNames |
| aString * | rigidBodyInfoName |
| bool | limitForces |
| real | maximumAllowableForce |
| real | maximumAllowableTorque |
| bool | correctionHasConverged |
| real | maximumRelativeCorrection |
| int | numberOfDeformingBodies |
| DeformingBodyMotion ** | deformingBodyList |
Member Enumeration Documentation
Constructor & Destructor Documentation
| MovingGrids::MovingGrids | ( | Parameters & | parameters_ | ) |
This class is used to move grids.
- Note
- : One should not expect the Parameters input object to have valid information at the time of this call.
References body, correctionHasConverged, deformingBodyList, integrate, isInitialized, limitForces, matrixMotionBody, maximumAllowableForce, maximumAllowableTorque, maximumRelativeCorrection, movingGridProblem, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, numberOfRigidBodyInfoNames, rigidBodyInfoCount, rigidBodyInfoName, and useHybridGridsForSurfaceIntegrals.
| MovingGrids::MovingGrids | ( | const MovingGrids & | mg | ) |
References body, correctionHasConverged, deformingBodyList, integrate, isInitialized, limitForces, matrixMotionBody, maximumAllowableForce, maximumAllowableTorque, maximumRelativeCorrection, movingGridProblem, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, numberOfRigidBodyInfoNames, rigidBodyInfoCount, rigidBodyInfoName, and useHybridGridsForSurfaceIntegrals.
|
virtual |
References body, deformingBodyList, integrate, matrixMotionBody, numberOfMatrixMotionBodies, numberOfRigidBodies, and rigidBodyInfoName.
Member Function Documentation
|
virtual |
Corrector step for moving grids.
This function is called at the corrector step to update the moving grids. For example, in a predictor corrector type algorithm we may want to correct the forces and torques on bodies since the solution can depend on these (For INS the pressure BC depends on the acceleration on the boundary ).
- Parameters
-
t1,cgf1 (input) : solution at the old time t2,cgf2 (input) : solution at the new time (these are valid values)
References DeformingBodyMotion::correct(), correctionHasConverged, deformingBodyList, maximumRelativeCorrection, numberOfDeformingBodies, and rigidBodyMotion().
|
inline |
References debug0.
Referenced by getBoundaryAcceleration(), getGridVelocity(), gridAccelerationBC(), moveDeformingBodies(), moveGrids(), rigidBodyMotion(), saveToShowFile(), and update().
| int MovingGrids::detectCollisions | ( | GridFunction & | cgf1 | ) |
Detect collisions.
References assert(), body, GridFunction::cg, Parameters::dbase, integrate, isInitialized, numberOfRigidBodies, parameters, and GridFunction::t.
Referenced by moveGrids().
| int MovingGrids::get | ( | const GenericDataBase & | dir, |
| const aString & | name | ||
| ) |
References body, MatrixMotion::get(), RigidBodyMotion::get(), gridsToMove, isInitialized, matrixMotionBody, moveOption, moveParameters, movingGrid, movingGridProblem, numberOfMatrixMotionBodies, numberOfRigidBodies, numberOfRigidBodyInfoNames, rigidBodyInfo, rigidBodyInfoCount, rigidBodyInfoName, and rigidBodyInfoTime.
|
virtual |
References amplitude, assert(), axis, body, boundaryCondition(), debug(), deformingBody, deformingBodyList, derivative(), dir, RigidBodyMotion::getAcceleration(), DeformingBodyMotion::getAccelerationBC(), RigidBodyMotion::getAngularVelocities(), MatrixMotion::getMotion(), DeformingBodyMotion::getNumberOfGrids(), RigidBodyMotion::getPointTransformationMatrix(), RigidBodyMotion::getPosition(), getRamp(), getUserDefinedBoundaryAcceleration(), I1, I2, I3, includeGhost, isInitialized, matMotionAcceleration2d, matMotionAcceleration3d, matrixMotion, matrixMotionBody, moveOption, moveParameters, movingGrid, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, ok, omega, oscillate, OV_ABORT(), printF(), R, ri, rigidBody, rotate, shift, side, and userDefinedMovingGrid.
Referenced by Cgins::applyFourthOrderBoundaryConditions().
| bool MovingGrids::getCorrectionHasConverged | ( | ) |
Return true if the correction steps for moving grids have converged. This is usually only an issue for "light" bodies.
References correctionHasConverged.
| DeformingBodyMotion & MovingGrids::getDeformingBody | ( | const int | bodyNumber | ) |
Return the object that describes a deforming body.
- Parameters
-
bodyNumber (input) : a body number starting from 0 and ending at getNumberOfDeformingBodies()-1.
References deformingBodyList, numberOfDeformingBodies, OV_ABORT(), and printF().
Referenced by DomainSolver::getMovingGridOption().
|
virtual |
References amplitude, assert(), axis, body, c, GridFunction::cg, cost, Parameters::dbase, debug(), deformingBody, deformingBodyList, derivative(), display(), ForBoundary, RigidBodyMotion::getAngularVelocities(), GridFunction::getGridVelocity(), getIndex(), MatrixMotion::getMotion(), DeformingBodyMotion::getNumberOfGrids(), RigidBodyMotion::getPointTransformationMatrix(), RigidBodyMotion::getPosition(), getRamp(), getUserDefinedGridVelocity(), DeformingBodyMotion::getVelocity(), RigidBodyMotion::getVelocity(), DeformingBodyMotion::getVelocityBC(), grid, GridFunction::gridVelocityTime, I1, I2, I3, isInitialized, matrixMotion, matrixMotionBody, moveOption, moveParameters, movingGrid, movingGridProblem, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, ok, omega, oscillate, OV_ABORT(), parameters, printF(), ri, rigidBody, rotate, scale, shift, side, sint, GridFunction::t, theta, and userDefinedMovingGrid.
Referenced by moveGrids().
| Integrate * MovingGrids::getIntegrate | ( | ) | const |
Return a pointer to the Integrate object.
References integrate.
Referenced by rigidBodyBoundaryProjection().
| MatrixMotion & MovingGrids::getMatrixMotionBody | ( | const int | bodyNumber | ) |
/brief Return the object that describes a matrix motion body. /param bodyNumber (input) : a body number starting from 0 and ending at getNumberOfMatrixMotionBodies()-1.
References matrixMotionBody, numberOfMatrixMotionBodies, OV_ABORT(), and printF().
Referenced by DomainSolver::getMovingGridOption().
| real MovingGrids::getMaximumRelativeCorrection | ( | ) |
Return the maximum relative change in the moving grid correction scheme. This is usually only an issue for "light" bodies.
References maximumRelativeCorrection.
Referenced by rigidBodyMotion().
| const RealArray & MovingGrids::getMoveParameters | ( | ) | const |
References moveParameters.
| int MovingGrids::getNumberOfDeformingBodies | ( | ) | const |
Return the number of deforming bodies.
References numberOfDeformingBodies.
Referenced by DomainSolver::buildMovingGridOptionsDialog(), and DomainSolver::getMovingGridOption().
| int MovingGrids::getNumberOfMatrixMotionBodies | ( | ) | const |
Return the number of matrix motion bodies.
References numberOfMatrixMotionBodies.
Referenced by DomainSolver::buildMovingGridOptionsDialog(), and DomainSolver::getMovingGridOption().
| int MovingGrids::getNumberOfRigidBodies | ( | ) | const |
Return the number of rigid bodies.
References numberOfRigidBodies.
Referenced by DomainSolver::buildMovingGridOptionsDialog(), DomainSolver::getMovingGridOption(), and rigidBodyBoundaryProjection().
|
protected |
Return ramp value and derivatives.
cubic ramp [0,1] : ramp(t)=t*t*(3-2*t) = 3t^2 - 2t^3
r'=6t*(1.-t)
ramp(1)=1
Referenced by getBoundaryAcceleration(), getGridVelocity(), gridAccelerationBC(), and moveGrids().
| RigidBodyMotion & MovingGrids::getRigidBody | ( | const int | bodyNumber | ) |
Return the object that describes a rigid body.
- Parameters
-
bodyNumber (input) : a body number starting from 0 and ending at getNumberOfRigidBodies()-1.
References body, numberOfRigidBodies, OV_ABORT(), and printF().
Referenced by DomainSolver::getMovingGridOption(), and rigidBodyBoundaryProjection().
| real MovingGrids::getTimeStepForRigidBodies | ( | ) | const |
References body, RigidBodyMotion::getTimeStepEstimate(), and numberOfRigidBodies.
| int MovingGrids::getUserDefinedBoundaryAcceleration | ( | MappedGrid & | mg, |
| realSerialArray & | gtt, | ||
| int | grid, | ||
| real | t0, | ||
| int | option, | ||
| const int | side, | ||
| const int | axis | ||
| ) |
References a, assert(), axis, dir, I1, I2, I3, linearMotion, moveOption, omega, ramp3tt, rampMotion, side, sinusoidalMotion, ta, userDefinedMovingGrid, and xv.
Referenced by getBoundaryAcceleration().
| int MovingGrids::getUserDefinedGridVelocity | ( | GridFunction & | gf0, |
| const real & | t0, | ||
| const int | grid | ||
| ) |
References a, assert(), axis, GridFunction::cg, GridFunction::getGridVelocity(), getIndex(), grid, I1, I2, I3, linearMotion, mg, moveOption, omega, OV_ABORT(), printF(), ramp3t, rampMotion, sinusoidalMotion, ta, userDefinedMovingGrid, and xv.
Referenced by getGridVelocity().
|
virtual |
Add the grid acceleration in the normal direction, n.x_tt, to the function f f is normally the function that holds the rhs for the pressure eqn.
BC: is p.n = ... -u.t = ... -g(x,t).tt where g is the postion of the moving grid
References amplitude, assert(), body, Parameters::dbase, debug(), deformingBody, deformingBodyList, derivative(), display(), f, RigidBodyMotion::getAcceleration(), DeformingBodyMotion::getAccelerationBC(), RigidBodyMotion::getAngularVelocities(), MatrixMotion::getMotion(), DeformingBodyMotion::getNumberOfGrids(), RigidBodyMotion::getPointTransformationMatrix(), RigidBodyMotion::getPosition(), getRamp(), RigidBodyMotion::getVelocity(), I1, I2, I3, includeGhost, isInitialized, J1, J2, J3, matMotionAcceleration2d, matMotionAcceleration3d, matrixMotion, matrixMotionBody, moveOption, moveParameters, movingGrid, normal, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, ok, omega, oscillate, OV_ABORT(), parameters, printF(), ri, rigidBody, rotate, shift, u, uLocal, userDefinedGridAccelerationBC(), and userDefinedMovingGrid.
| bool MovingGrids::gridIsMoving | ( | int | grid | ) | const |
References grid.
|
protected |
References assert(), Parameters::dbase, deformingBodyList, i, isInitialized, numberOfDeformingBodies, numberOfRigidBodyInfoNames, parameters, rigidBodyInfoCount, and rigidBodyInfoName.
Referenced by update().
| bool MovingGrids::isMovingGridProblem | ( | ) | const |
References movingGridProblem.
|
virtual |
References all, assert(), GridFunction::cg, cg, debug(), deformingBodyList, DeformingBodyMotion::integrate(), isInitialized, and numberOfDeformingBodies.
Referenced by moveGrids().
|
virtual |
Move grids to the new time.
The basic idea is to advance the solution from grid g1 at time t1 to grid g3 at time t3 using the grid velocity from grid g2 at time t2:
- g3(t3) <- g1(t1) + (t3-t1)*d(g2(t2))/dt Steps:
- detect collisions
- compute forces and moments on rigid and deforming bodies
- compute grid velocity of g2
- move grids
- compute grid velocity of g3
- Parameters
-
t1,cgf1 (input) : grid and solution at time t1 t2,cgf2 (input) : grid and solution at time t2. The grid velocity, cgf2.gridVelocity, is computed and used from this time. t3 (input) : new time cgf3 (output): holds new grid at time t3. The grid velocity, cgf3.gridVelocity, is computed at the. end of the step. NOTE: cgf3 must be different from cgf1.
References amplitude, assert(), axis, body, GridFunction::cg, cg, d, Parameters::dbase, debug(), deformingBody, deformingBodyList, detectCollisions(), display(), getGridVelocity(), RigidBodyMotion::getInitialConditions(), MatrixMotion::getMotion(), RigidBodyMotion::getPosition(), getRamp(), RigidBodyMotion::getRotationMatrix(), grid, isInitialized, mapPointer, matrixMotion, matrixMotionBody, moveDeformingBodies(), moveOption, moveParameters, movingGrid, movingGridProblem, notMoving, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, GridFunction::numberOfTransformMappings, omega, oscillate, OV_ABORT(), parameters, printF(), r, Parameters::readInitialConditionFromRestartFile, Parameters::readInitialConditionFromShowFile, DeformingBodyMotion::regenerateComponentGrids(), rigidBody, rigidBodyMotion(), rotate, scale, shift, sx, sy, sz, GridFunction::t, GridFunction::transform, userDefinedMotion(), userDefinedMovingGrid, userDefinedTransformMotion(), and x3.
| MovingGrids::MovingGridOption MovingGrids::movingGridOption | ( | int | grid | ) | const |
References grid.
Referenced by DomainSolver::displayParameters(), update(), and DomainSolver::writeParameterSummary().
| aString MovingGrids::movingGridOptionName | ( | MovingGridOption | option | ) | const |
References scale.
Referenced by DomainSolver::displayParameters(), and DomainSolver::writeParameterSummary().
| int MovingGrids::put | ( | GenericDataBase & | dir, |
| const aString & | name | ||
| ) | const |
References dir.
|
virtual |
References a11, all, assert(), axis, bb, body, c, cc, GridFunction::cg, cg, GridFunction::conservativeVariables, RigidBodyMotion::correct(), correctionHasConverged, Parameters::dbase, debug(), dir, f, F, FOR_3D, GridFunction::form, RigidBodyMotion::getAngularVelocities(), RigidBodyMotion::getCorrectionHasConverged(), RigidBodyMotion::getDensity(), RigidBodyMotion::getForce(), RigidBodyMotion::getMass(), getMaximumRelativeCorrection(), Parameters::getNormalForce(), RigidBodyMotion::getPosition(), RigidBodyMotion::getTimeStepEstimate(), RigidBodyMotion::getVelocity(), grid, i, i1, i2, i3, includeGhost, RigidBodyMotion::integrate(), integrate, isInitialized, j, limitForces, mask, maskLocal, maximumAllowableForce, maximumAllowableTorque, maximumRelativeCorrection, n, numberOfRigidBodies, numberOfRigidBodyInfoNames, ok, OV_ABORT(), parameters, pc, printF(), R, r, rigidBodyInfo, rigidBodyInfoCount, rigidBodyInfoTime, side, GridFunction::t, T, tc, GridFunction::u, u, uc, uLocal, RigidBodyMotion::useAddedMass(), V, vc, wc, and x.
Referenced by correctGrids(), and moveGrids().
|
virtual |
Save moving grid info the the show file. We save a "sequence" for each rigid body.
References all, Parameters::dbase, debug(), N(), numberOfRigidBodies, parameters, printF(), rigidBodyInfo, rigidBodyInfoCount, rigidBodyInfoName, and rigidBodyInfoTime.
Referenced by DomainSolver::advance(), Cgsm::saveShow(), DomainSolver::saveShow(), and Cgmp::solve().
| int MovingGrids::setIsMovingGridProblem | ( | bool | trueOrFalse = TRUE | ) |
References movingGridProblem.
|
virtual |
Define moving grid properties interactively.
This routine is used to define how bodies move. A moving body may be constructed with multiple grids (e.g. a sphere may be covered with 2 or three patches). There are two main steps to define a motion of a body
- define the motion of a body
- define which grids belong to the body The types of motions are
- "matrix motions" define predetermined rigid motions and are given by x(t) = R(t) x(0) + g(t) where R(t) is a "rotation" (or scaling) matrix and g(t) is a translation.
- "rigid body motions" define motions of rigid bodies whose position depend on the forces and torques imposed by the fluid.
- "deforming body motions" define bodies that can move and deform (either specified deformations or deformations that depend on the fluid).
- "user defined motion" are motions defined by the user in the file UserDefinedMotion.C
References all, amplitude, assert(), axis, body, boundaryCondition(), c, Parameters::dbase, debug(), debug0, DeformingBodyMotion::defineBody(), deformingBody, deformingBodyList, dir, e, f, RigidBodyMotion::getDensity(), grid, includeGhost, DeformingBodyMotion::initialize(), initialize(), DeformingBodyMotion::initializePast(), integrate, isInitialized, limitForces, matrixMotion, matrixMotionBody, maximumAllowableForce, maximumAllowableTorque, moveOption, moveParameters, movingGrid, movingGridOption(), notMoving, numberOfDeformingBodies, numberOfMatrixMotionBodies, numberOfRigidBodies, numberOfRigidBodyInfoNames, ok, omega, oscillate, parameters, printF(), rigidBody, rigidBodyInfo, rigidBodyInfoTime, rotate, scale, RigidBodyMotion::setInitialCentreOfMass(), RigidBodyMotion::setInitialConditions(), RigidBodyMotion::setMass(), shift, side, sx, sy, sz, tol, u, MatrixMotion::update(), DeformingBodyMotion::update(), RigidBodyMotion::update(), updateUserDefinedMotion(), useHybridGridsForSurfaceIntegrals, userDefinedMovingGrid, and x.
| int MovingGrids::updateToMatchGrid | ( | CompositeGrid & | cg | ) |
References all, grid, moveOption, moveParameters, movingGrid, and R.
| int MovingGrids::updateUserDefinedMotion | ( | CompositeGrid & | cg, |
| GenericGraphicsInterface & | gi | ||
| ) |
References a, linearMotion, omega, rampMotion, sinusoidalMotion, and ta.
Referenced by update().
| int MovingGrids::userDefinedGridAccelerationBC | ( | const int & | grid, |
| const real & | t0, | ||
| MappedGrid & | c, | ||
| realMappedGridFunction & | u, | ||
| realMappedGridFunction & | f, | ||
| realMappedGridFunction & | gridVelocity, | ||
| realSerialArray & | normal, | ||
| const Index & | I1, | ||
| const Index & | I2, | ||
| const Index & | I3, | ||
| const Index & | I1g, | ||
| const Index & | I2g, | ||
| const Index & | I3g | ||
| ) |
References a, assert(), f, I1, I2, I3, includeGhost, J1, J2, J3, linearMotion, moveOption, normal, ok, omega, OV_ABORT(), printF(), ramp3tt, rampMotion, sinusoidalMotion, ta, userDefinedMovingGrid, and xv.
Referenced by gridAccelerationBC().
| int MovingGrids::userDefinedMotion | ( | const real & | t1, |
| const real & | t2, | ||
| const real & | t3, | ||
| const real & | dt0, | ||
| GridFunction & | cgf1, | ||
| GridFunction & | cgf2, | ||
| GridFunction & | cgf3 | ||
| ) |
Referenced by moveGrids().
| int MovingGrids::userDefinedTransformMotion | ( | const real & | t1, |
| const real & | t2, | ||
| const real & | t3, | ||
| const real & | dt0, | ||
| GridFunction & | cgf1, | ||
| GridFunction & | cgf2, | ||
| GridFunction & | cgf3, | ||
| const int | grid | ||
| ) |
References a, assert(), Parameters::dbase, grid, linearMotion, moveOption, omega, OV_ABORT(), parameters, printF(), ramp3, ramp3t, rampMotion, sinusoidalMotion, ta, GridFunction::transform, userDefinedMovingGrid, and xv.
Referenced by moveGrids().
Member Data Documentation
|
protected |
|
protected |
Referenced by correctGrids(), getCorrectionHasConverged(), MovingGrids(), and rigidBodyMotion().
|
protected |
|
protected |
Referenced by get().
|
protected |
Referenced by detectCollisions(), getIntegrate(), MovingGrids(), rigidBodyMotion(), update(), and ~MovingGrids().
|
protected |
|
protected |
Referenced by MovingGrids(), rigidBodyMotion(), and update().
|
protected |
Referenced by get(), getBoundaryAcceleration(), getGridVelocity(), getMatrixMotionBody(), gridAccelerationBC(), moveGrids(), MovingGrids(), update(), and ~MovingGrids().
|
protected |
Referenced by MovingGrids(), rigidBodyMotion(), and update().
|
protected |
Referenced by MovingGrids(), rigidBodyMotion(), and update().
|
protected |
Referenced by correctGrids(), getMaximumRelativeCorrection(), MovingGrids(), and rigidBodyMotion().
|
protected |
|
protected |
Referenced by get(), getBoundaryAcceleration(), getGridVelocity(), getMoveParameters(), gridAccelerationBC(), moveGrids(), update(), and updateToMatchGrid().
|
protected |
Referenced by get(), getBoundaryAcceleration(), getGridVelocity(), gridAccelerationBC(), moveGrids(), update(), and updateToMatchGrid().
|
protected |
Referenced by get(), getGridVelocity(), isMovingGridProblem(), moveGrids(), MovingGrids(), and setIsMovingGridProblem().
|
protected |
|
protected |
|
protected |
|
protected |
Referenced by get(), initialize(), MovingGrids(), rigidBodyMotion(), and update().
|
protected |
|
protected |
Referenced by get(), rigidBodyMotion(), saveToShowFile(), and update().
|
protected |
Referenced by get(), initialize(), MovingGrids(), rigidBodyMotion(), and saveToShowFile().
|
protected |
Referenced by get(), initialize(), MovingGrids(), saveToShowFile(), and ~MovingGrids().
|
protected |
Referenced by get(), rigidBodyMotion(), saveToShowFile(), and update().
|
protected |
Referenced by MovingGrids(), and update().
The documentation for this class was generated from the following files:
