#include "Ogen.h"#include "Overture.h"#include "display.h"#include "conversion.h"#include "ParallelUtility.h"#include "CanInterpolate.h"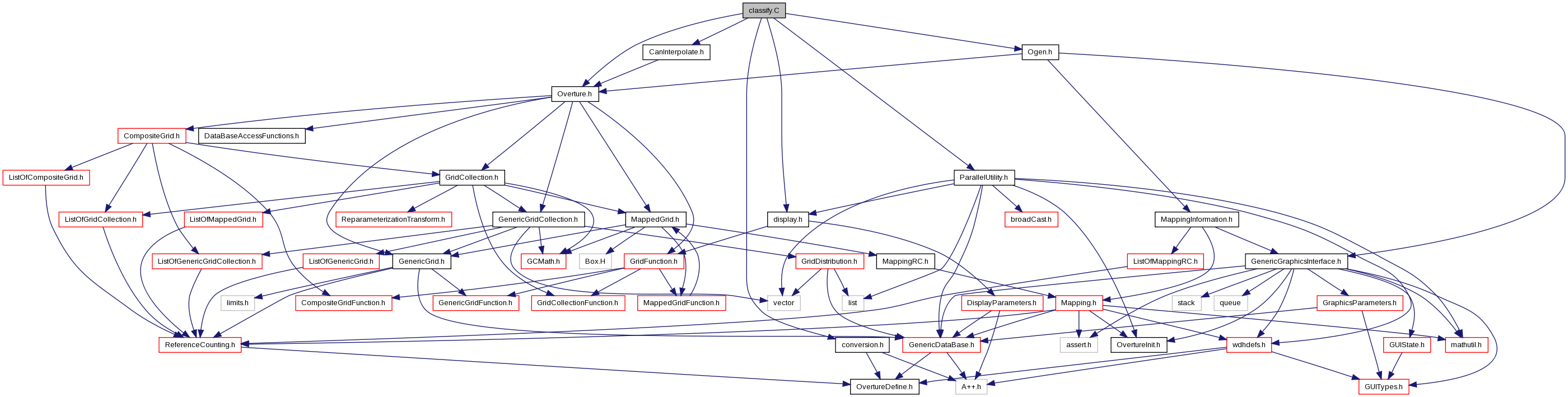
Macros | |
| #define | GET_LOCAL(type, xd, xs) type ## SerialArray & xs = xd |
| #define | GET_LOCAL_CONST(type, xd, xs) const type ## SerialArray & xs = xd |
| #define | FOR_3(i1, i2, i3, I1, I2, I3) |
| #define | FOR_3D(i1, i2, i3, I1, I2, I3) |
| #define | FOR_3IJD(i1, i2, i3, I1, I2, I3, j1, j2, j3, J1, J2, J3) |
| #define | iab(side, axis) ab[(axis)][(side)] |
| #define | boundaryCondition(i0, i1) boundaryConditionp[i0+2*(i1)] |
| #define | boundaryDiscretizationWidth(i0, i1) boundaryDiscretizationWidthp[i0+2*(i1)] |
| #define | extendedIndexRange(i0, i1) eirp[i0+2*(i1)] |
| #define | discretizationWidth(i0) dwp[i0] |
| #define | isPeriodic(i0) isPeriodicp[i0] |
| #define | mask(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | iab(side, axis) ab[(axis)][(side)] |
| #define | boundaryCondition(i0, i1) boundaryConditionp[i0+2*(i1)] |
| #define | boundaryDiscretizationWidth(i0, i1) boundaryDiscretizationWidthp[i0+2*(i1)] |
| #define | extendedIndexRange(i0, i1) eirp[i0+2*(i1)] |
| #define | discretizationWidth(i0) dwp[i0] |
| #define | isPeriodic(i0) isPeriodicp[i0] |
| #define | mask(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | iab(side, axis) ab[(axis)][(side)] |
| #define | boundaryCondition(i0, i1) boundaryConditionp[i0+2*(i1)] |
| #define | boundaryDiscretizationWidth(i0, i1) boundaryDiscretizationWidthp[i0+2*(i1)] |
| #define | extendedIndexRange(i0, i1) eirp[i0+2*(i1)] |
| #define | discretizationWidth(i0) dwp[i0] |
| #define | isPeriodic(i0) isPeriodicp[i0] |
| #define | mask(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | iab(side, axis) ab[(axis)][(side)] |
| #define | MASK(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | MASK(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | INVERSEGRID(i0, i1, i2) inverseGridgp[i0+inverseGridgDim0*(i1+inverseGridgDim1*(i2))] |
| #define | MASK(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | INVERSEGRID(i0, i1, i2) inverseGridgp[i0+inverseGridgDim0*(i1+inverseGridgDim1*(i2))] |
| #define | iab(side, axis) abi[(axis)][(side)] |
| #define | jab(side, axis) abj[(axis)][(side)] |
| #define | MASK(i0, i1, i2) maskgp[i0+maskgDim0*(i1+maskgDim1*(i2))] |
| #define | INVERSEGRID(i0, i1, i2) inverseGridgp[i0+inverseGridgDim0*(i1+inverseGridgDim1*(i2))] |
| #define | iab(side, axis) abi[(axis)][(side)] |
| #define | jab(side, axis) abj[(axis)][(side)] |
| #define | XC(iv, axis) (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define | XC(iv, axis) (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define | XC0(i1, i2, i3) (xab[0][0]+dvx[0]*(i1-iv0[0])) |
| #define | XC1(i1, i2, i3) (xab[0][1]+dvx[1]*(i2-iv0[1])) |
| #define | XC2(i1, i2, i3) (xab[0][2]+dvx[2]*(i3-iv0[2])) |
| #define | XC(iv, axis) (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define | XC0(i1, i2, i3) (xab[0][0]+dvx[0]*(i1-iv0[0])) |
| #define | XC1(i1, i2, i3) (xab[0][1]+dvx[1]*(i2-iv0[1])) |
| #define | XC2(i1, i2, i3) (xab[0][2]+dvx[2]*(i3-iv0[2])) |
| #define | XC(iv, axis) (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define | MASK(i0, i1, i2) maskp[i0+maskDim0*(i1+maskDim1*(i2))] |
| #define | XC0(i1, i2, i3) (xab[0][0]+dvx[0]*(i1-iv0[0])) |
| #define | XC1(i1, i2, i3) (xab[0][1]+dvx[1]*(i2-iv0[1])) |
| #define | XC2(i1, i2, i3) (xab[0][2]+dvx[2]*(i3-iv0[2])) |
| #define | XC(iv, axis) (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
Macro Definition Documentation
| #define boundaryCondition | ( | i0, | |
| i1 | |||
| ) | boundaryConditionp[i0+2*(i1)] |
| #define boundaryCondition | ( | i0, | |
| i1 | |||
| ) | boundaryConditionp[i0+2*(i1)] |
| #define boundaryCondition | ( | i0, | |
| i1 | |||
| ) | boundaryConditionp[i0+2*(i1)] |
| #define boundaryDiscretizationWidth | ( | i0, | |
| i1 | |||
| ) | boundaryDiscretizationWidthp[i0+2*(i1)] |
Referenced by Ogen::canDiscretize(), Ogen::isNeededForDiscretization(), and MappedGridData::put().
| #define boundaryDiscretizationWidth | ( | i0, | |
| i1 | |||
| ) | boundaryDiscretizationWidthp[i0+2*(i1)] |
| #define boundaryDiscretizationWidth | ( | i0, | |
| i1 | |||
| ) | boundaryDiscretizationWidthp[i0+2*(i1)] |
| #define discretizationWidth | ( | i0 | ) | dwp[i0] |
Referenced by InterpolatePointsOnAGrid::buildInterpolationInfo(), Ogen::canDiscretize(), checkOverlappingGrid(), Ogen::checkParallelGhostWidth(), Integrate::computeLeftNullVector(), Ogen::displayCompositeGridParameters(), getError(), Ogen::isNeededForDiscretization(), main(), MappedGridData::put(), and Integrate::updateToMatchGrid().
| #define discretizationWidth | ( | i0 | ) | dwp[i0] |
| #define discretizationWidth | ( | i0 | ) | dwp[i0] |
| #define extendedIndexRange | ( | i0, | |
| i1 | |||
| ) | eirp[i0+2*(i1)] |
| #define extendedIndexRange | ( | i0, | |
| i1 | |||
| ) | eirp[i0+2*(i1)] |
| #define extendedIndexRange | ( | i0, | |
| i1 | |||
| ) | eirp[i0+2*(i1)] |
| #define FOR_3 | ( | i1, | |
| i2, | |||
| i3, | |||
| I1, | |||
| I2, | |||
| I3 | |||
| ) |
| #define FOR_3D | ( | i1, | |
| i2, | |||
| i3, | |||
| I1, | |||
| I2, | |||
| I3 | |||
| ) |
Referenced by Ogen::classifyRedundantPoints(), Ogen::markPointsNeededForInterpolation(), Ogen::unmarkBoundaryInterpolationPoints(), and Ogen::unmarkInterpolationPoints().
| #define FOR_3IJD | ( | i1, | |
| i2, | |||
| i3, | |||
| I1, | |||
| I2, | |||
| I3, | |||
| j1, | |||
| j2, | |||
| j3, | |||
| J1, | |||
| J2, | |||
| J3 | |||
| ) |
Referenced by Ogen::markMaskAtGhost().
| #define GET_LOCAL | ( | type, | |
| xd, | |||
| xs | |||
| ) | type ## SerialArray & xs = xd |
Referenced by Ogen::canDiscretize(), Ogen::classifyPoints(), Ogen::classifyRedundantPoints(), Ogen::generateInterpolationArrays(), Ogen::interpolateAll(), Ogen::isNeededForDiscretization(), Ogen::markMaskAtGhost(), Ogen::markPointsNeededForInterpolation(), Ogen::unmarkBoundaryInterpolationPoints(), and Ogen::unmarkInterpolationPoints().
| #define GET_LOCAL_CONST | ( | type, | |
| xd, | |||
| xs | |||
| ) | const type ## SerialArray & xs = xd |
| #define iab | ( | side, | |
| axis | |||
| ) | ab[(axis)][(side)] |
| #define iab | ( | side, | |
| axis | |||
| ) | ab[(axis)][(side)] |
| #define iab | ( | side, | |
| axis | |||
| ) | ab[(axis)][(side)] |
| #define iab | ( | side, | |
| axis | |||
| ) | ab[(axis)][(side)] |
| #define iab | ( | side, | |
| axis | |||
| ) | abi[(axis)][(side)] |
| #define iab | ( | side, | |
| axis | |||
| ) | abi[(axis)][(side)] |
| #define isPeriodic | ( | i0 | ) | isPeriodicp[i0] |
Referenced by InterpolateRefinements::boxWasAdjustedInPeriodicDirection(), Regrid::buildGrids(), InterpolatePoints::buildInterpolationInfo(), InterpolatePointsOnAGrid::buildInterpolationInfo(), ParentChildSiblingInfo::buildParentChildSiblingInfoObjects(), Ogen::canDiscretize(), CanInterpolate::canInterpolate(), CanInterpolate::canInterpolateOld(), checkGrid(), PlotIt::contourOpt2d(), Ogen::cutHolesNewer(), Mapping::display(), fileOutput(), ApproximateGlobalInverse::findNearestGridPoint(), Mapping::getIsPeriodic(), interpolatePoints(), InterpolateRefinements::interpolateRefinementBoundaries(), InterpolateRefinements::interpolateRefinements(), interpolateRefinements(), Ogen::isNeededForDiscretization(), Ogen::isOnInterpolationBoundary(), main(), CompositeTopology::merge(), GridStatistics::printGridStatistics(), MappedGridData::put(), Mapping::put(), FileOutput::saveData(), Ogmg::smoothLine(), CanInterpolate::transferInterpDataForAMR(), Ogen::updateRefinement(), Ogen::updateRefinementFillInterpolationData(), Ogen::updateRefinementFillInterpolationDataNew(), Ogen::updateRefinementNew(), xInterpolate(), and xInterpolateOpt().
| #define isPeriodic | ( | i0 | ) | isPeriodicp[i0] |
| #define isPeriodic | ( | i0 | ) | isPeriodicp[i0] |
| #define jab | ( | side, | |
| axis | |||
| ) | abj[(axis)][(side)] |
| #define jab | ( | side, | |
| axis | |||
| ) | abj[(axis)][(side)] |
| #define XC | ( | iv, | |
| axis | |||
| ) | (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define XC | ( | iv, | |
| axis | |||
| ) | (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define XC | ( | iv, | |
| axis | |||
| ) | (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define XC | ( | iv, | |
| axis | |||
| ) | (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define XC | ( | iv, | |
| axis | |||
| ) | (xab[0][axis]+dvx[axis]*(iv[axis]-iv0[axis])) |
| #define XC0 | ( | i1, | |
| i2, | |||
| i3 | |||
| ) | (xab[0][0]+dvx[0]*(i1-iv0[0])) |
Referenced by Ogen::interpolateAll().
| #define XC0 | ( | i1, | |
| i2, | |||
| i3 | |||
| ) | (xab[0][0]+dvx[0]*(i1-iv0[0])) |
| #define XC0 | ( | i1, | |
| i2, | |||
| i3 | |||
| ) | (xab[0][0]+dvx[0]*(i1-iv0[0])) |
Referenced by Ogen::interpolateAll().
| #define XC2 | ( | i1, | |
| i2, | |||
| i3 | |||
| ) | (xab[0][2]+dvx[2]*(i3-iv0[2])) |
Referenced by Ogen::cutHoles(), Ogen::cutHolesNew(), Ogen::cutHolesNewer(), Ogen::interpolateAll(), and Ogen::interpolateAPoint().
| #define XC2 | ( | i1, | |
| i2, | |||
| i3 | |||
| ) | (xab[0][2]+dvx[2]*(i3-iv0[2])) |
| #define XC2 | ( | i1, | |
| i2, | |||
| i3 | |||
| ) | (xab[0][2]+dvx[2]*(i3-iv0[2])) |
