test program to the Newton-Euler rigid body evolution equations (RigidBodyMotion.C) More...
#include "Overture.h"#include "SquareMapping.h"#include "PlotStuff.h"#include "MatrixTransform.h"#include "CrossSectionMapping.h"#include "RigidBodyMotion.h"#include "App.h"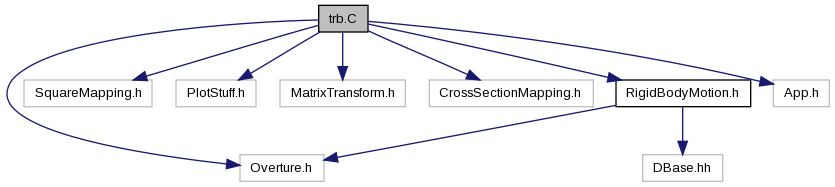
Classes | |
| class | TestRigidBody |
Functions | |
| RealArray | mult (const RealArray &a, const RealArray &b) |
| return the product if two matrices. | |
| RealArray | trans (const RealArray &a) |
| return the transpose of a matrix | |
| int | convergenceRate (const RealArray &h, const RealArray &e, RealArray &sigma) |
| int | main (int argc, char *argv[]) |
Variables | |
| enum TestProblemEnum | testProblem =generalMotion |
Detailed Description
test program to the Newton-Euler rigid body evolution equations (RigidBodyMotion.C)
Enumeration Type Documentation
| enum TestProblemEnum |
Function Documentation
| int convergenceRate | ( | const RealArray & | h, |
| const RealArray & | e, | ||
| RealArray & | sigma | ||
| ) |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
References a, TestRigidBody::addedMass, assert(), TestRigidBody::body, c, TestRigidBody::cfl, constantW0Acceleration, constantW1Acceleration, constantW2Acceleration, constantX0Acceleration, constantX1Acceleration, constantX2Acceleration, convergenceRate(), TestRigidBody::debug, RigidBodyMotion::debug, TestRigidBody::dt0, exponentialV, fallingSphere, freeRotation1, freeRotation2, freeRotation3, TestRigidBody::freeRotationAxis, generalMotion, TestRigidBody::getErrors(), RigidBodyMotion::getTimeSteppingMethodName(), i, RigidBodyMotion::implicitRungeKutta, RigidBodyMotion::improvedEuler, j, RigidBodyMotion::leapFrogTrapezoidal, TestRigidBody::mass, TestRigidBody::method, mult(), TestRigidBody::orderOfAccuracy, orderOfAccuracy, OV_ABORT(), TestRigidBody::plotBody, TestRigidBody::plotOption, printF(), R, TestRigidBody::saveMatlabFile, RigidBodyMotion::setNewtonTolerance(), sinX0Acceleration, sinX1Acceleration, sinX2Acceleration, TestRigidBody::solve(), TestRigidBody::testName, testProblem, TestRigidBody::tFinal, TestRigidBody::tPlot, and trigonometricMotion.
| RealArray mult | ( | const RealArray & | a, |
| const RealArray & | b | ||
| ) |
return the product if two matrices.
References a, assert(), c, display(), i, j, k, m, n, OV_ABORT(), and printF().
Referenced by RigidBodyMotion::dirkImplicitSolve(), RigidBodyMotion::getCoordinates(), RigidBodyMotion::getForce(), RigidBodyMotion::getForceInternal(), RigidBodyMotion::integrate(), main(), RigidBodyMotion::takeStepLeapFrog(), and RigidBodyMotion::takeStepTrapezoid().
| RealArray trans | ( | const RealArray & | a | ) |
return the transpose of a matrix
References a, c, i, j, m, and n.
Referenced by RigidBodyMotion::dirkImplicitSolve(), RigidBodyMotion::getCoordinates(), RigidBodyMotion::takeStepLeapFrog(), and RigidBodyMotion::takeStepTrapezoid().
Variable Documentation
| enum TestProblemEnum testProblem =generalMotion |
